

今天给大家分享一篇文献,关于车灯的设计,欢迎大家添加微信群探讨交流,文章转载于《基于激光雷达的自适应车尾灯的设计》许珂,曾丽娜等。
汽车照明朝着更加安全、环保、节能、智能化、人性化的方向发展,汽车智能化是当今全球汽车界重要的发展趋势之一。使用激光作为光源,基于激光雷达和控制电路对激光的功率进行实时调制,并利用激光投影图案对后方行驶车辆进行警示。该车尾灯不仅更加节能,还提高了驾驶的安全性。
-
引言
汽车尾灯从最开始只是满足法规的照明功能,到现在与汽车前照灯同步发展,越来越智能化,目前已经实现了投影、迎宾、流水效果等功能[3]。目前投影式汽车灯主要有两种方式。一种是通过挡板实现投影,另一种是通过DMD芯片实现投影。第一种挡板式投影如图1所示,主要由抛物式反射面、光源、挡板及光学透镜四部分组成 [4]。
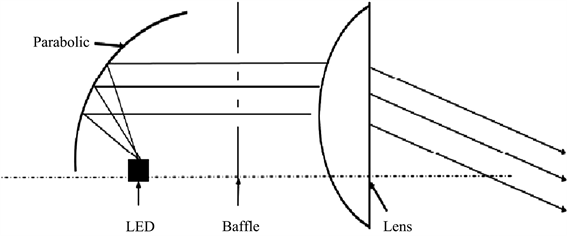
图1.尾灯投影示意图
该尾灯投影示意图具有结构简单的优点,这减少了在实际整灯组装过程中由于人为的影响造成出现的光源位置偏移,进而影响整灯的出光效果。但是该设计还存在着照明亮度不足的问题,单颗LED的功率有限,并且LED光源为伯朗式光源,光强随着出射角度以及距离的增加而减小,这会导致出光效果不够明显,不能使后车司机看清,特别是在车速快车距又相对较远的高速路上,以及各种能见度不高的路况。
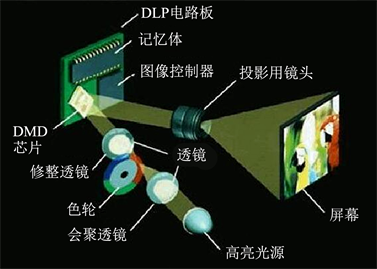
图2. DMD芯片式投影原理
第二种DMD芯片式投影原理如图2所示,DLP投影传统光学结构主要由光源,合光(分光)器件,匀光器件及中继系统,DMD芯片以及投影物镜等几大部分组成 [5]。
这种DMD芯片式投影可以获得与DMD芯片大小一致的且均匀度高的光斑,并且可以通过DMD芯片角度的不断调整而改变出光的方向,从而满足近光、远光调整的目的。但是该装置一般用RGB三色来合成白光,适用于汽车的前照灯,不符合国家法规对后车灯的规定。
-
设计方案
为了解决以上问题,本文提出以激光作为光源设计一款基于激光雷达的自适应尾灯的设计,主要研究并分析了光源排列的最佳间距,并建立了一个虚拟模型,用来探究前车与后车之间尾灯自动开启的最佳阈值。最后探究并计算了该装置与传统车尾灯的能耗比例。该激光照明系统主要由控制模块和光学模块两部分组成。通过激光雷达发射出光信号,当光信号到达后车时,光信号返回并反馈给控制电路,通过控制电路控制光源的功率以及发射角,达到给予后车警示的目的。整体尾灯系统结构如图3所示。
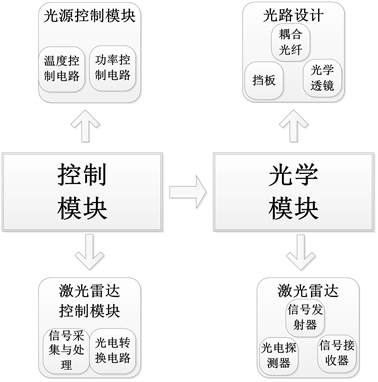
图3. 整体尾灯系统结构
本文所设计的基于激光雷达的汽车尾灯系统的工作流程图如图4所示。首先前车发出激光雷达发射光信号,当光信号到达后方形式车辆时,经过反射,信号回馈给激光雷达 [6]。通过激光雷达,控制电路接收到返回的光信号并开始进行处理,从而对LD光源进行调控。
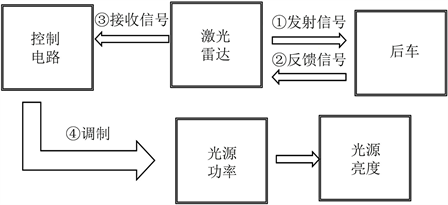
图4. 基于激光雷达的汽车尾灯系统的工作流程图
目前,市面上普遍选用的灯为LED灯,但是LED与LD相比它的能耗更高,并且辐射能流比LD更低。通常汽车尾灯只能采用红色、白色和黄色。由于红光本身在人们的认知中就是"警戒色",选用波长为650 nm的贴片式红色LD作为激光源。激光雷达使用905 nm波长的激光作为探测信号,可进行水平方向360˚探测,旋转速度可达5 Hz,其探测距离达到300 m的范围,具有厘米量级的探测精度 [7] [8] [9]。
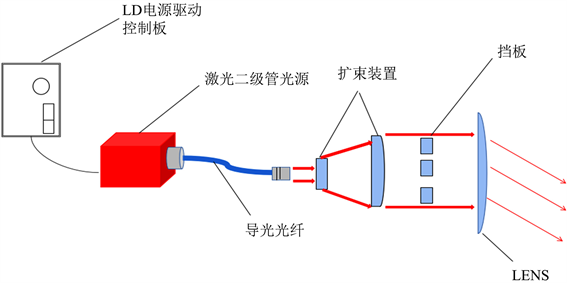
图5. 照明系统的光路设计
本文的光路设计如图5所示,光源拟采用多个红光激光二极管以矩阵的形式排列并通过合束光纤进行耦合,考虑到耦合效率,光纤数值孔径不宜过小。激光通过光纤耦合后,光束直径变为5 mm。经过准直镜扩束,通过对光束进行耦合、整形达到使得光斑大小整合到与挡板大小一致,这样就能最大限度的利用光能,达到节能的目的。最后再通过透镜投影到地面。
通过zemax设计一个5倍的光束扩束系统 [10] [11] [12]。整个扩束系统长250 mm,两个透镜之间间距为230 mm。两个透镜的使用材料均为n-bk7,前透镜的曲率半径为−20,后透镜的曲率半径为200和−200,仿真结果如图6所示。
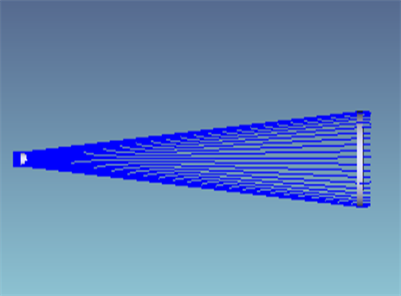
图6. 扩束装置的仿真
本设计采用的光型是相对简的感叹号与直线结合的形状,如图7所示。挡板的长宽根据光束直径进行设计,由上文光束通过扩束装置后光束直径变为250 mm,为了避免光源的浪费,我们将挡板的长宽与光束直径保持一致,以达到光能使用率最大化的目的。
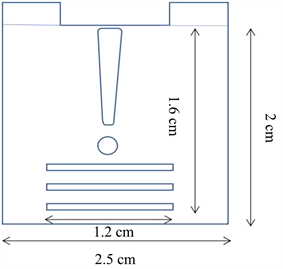
图7. 挡板的设计
-
总结
本文采用扩束装置与挡板结合的汽车尾灯结构,该尾灯通过激光雷达与电路结合的形式使得尾灯可以智能开关,该尾灯通过激光雷达对车距阈值的判定具有主动安全性,可以显著提醒后车司机保持车距。经过本文的研究发现,光源的排列方式应为矩阵2 × 2的形式排列,并且灯珠间隔应为10 mm。经过整体估算,该装置比传统的LED尾灯节能约70%左右。该照明系统解决了以往LED能耗高、穿透性不强、发光功率不够的问题,增加了驾驶者的安全性和体现了这套系统节能减排的价值。随着如今汽车的不断更新迭代,相信该套激光照明系统必将有重大的应用前景和价值。
文章引用
许 珂,曾丽娜,刘兆悦,吴奇寒,廖 芯,李再金,徐东昕,陈 浩,乔忠良,曲 轶,刘国军,李 林. 基于激光雷达的自适应车尾灯的设计
Design of Adaptive Tail Light Based on Lidar[J]. 光电子, 2021, 11(03): 132-141. https://doi.org/10.12677/OE.2021.113016
参考文献
1. 刘波. 轿车灯具时尚新潮流[J]. 光源与照明, 2007(2): 44-45.
2. 师建华. 创新协同开展汽车零部件产业新未来[M]. 北京: 中国汽车工业协会, 2016.
3. 李祥兵, 彭丽, 王坦, 赵晓茹, 王春才. 智能网联时代汽车照明系统的开发[J]. 汽车工程师, 2020(12): 28-31+48.
4. 鲁梦, 郑丽丽, 李静, 徐宝奇, 刘长松. 汽车尾灯迎宾功能驱动技术研究[J]. 中国照明电器, 2021(1): 36-42.
5. 贾琼瑶, 贺锋涛. 激光投影显示中散斑均化问题的研究[J]. 激光技术, 2013, 37(3): 400-403.
6. 郑永超, 赵铭军, 张文平, 等. 激光雷达技术及其发展动向[J]. 红外与激光工程, 2006, 35(z3): 240-246.
7. Lin, J.R. and Zhang, F. (2019) Loam_livox: A Fast, Robust, High-Precision LiDAR Odometry and Mapping Package for LiDARs of Small FoV. 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May-31 August 2020, 3126-3131. https://doi.org/10.1109/ICRA40945.2020.9197440
8. 邱纯鑫. 激光雷达与自动驾驶的产业化之路[J]. 人工智能, 2018(6): 37-47.
9. Han, S., Kim, Y.J. and Kim, S.W. (2015) Parallel Determination of Absolute Distances to Multiple Targets by Time-of-Flight Measurement Using Femtosecond Light Pulses. Optics Express, 23, 25874-25882. https://doi.org/10.1364/OE.23.025874
10. 黄旭. 基于TDC-GP2的远距离脉冲式激光测距的研究[D]: [硕士学位论文]. 北京: 北京交通大学, 2012: 11-12.
11. 邓锡铭, 梁向春, 陈泽尊, 余文炎, 马仁勇. 用透镜列阵实现大焦斑面的均匀照射[J]. 中国激光, 1985(5): 257-260.
12. 黄耀林, 王敏, 寇远凤. 一种激光连续变倍准直扩束系统的设计[J]. 光学仪器, 2018, 40(2): 38-43.