

关于激光雷达中光电雪崩二极管(APD)的应用
粉丝:18文章:2
关注
激光雷达在汽车领域的高速发展,推动了光电探测器的大量应用。目前根据激光雷达在不同系统应用场景下主要使用APD、PIN光电二极管、单光子雪崩二极管(SPAD)、硅光电倍增管(SiPM)做为探测器。下面将讲述APD的使用。
一、APD的结构
APD的基本结构是PN结,常见的为N+PΠP+(拉通型)结构,如下图所示,PN+结的耗尽区承受了反向偏压的大部分压降,耗尽区向P区扩散。Π区为接近本征态的低参杂区,电场较低,但足以是载流子保持一定的飘移速率。当偏压加到一定程度后,耗尽层将被拉通到Π型区,一直抵达P+区。
此结构使得APD获得内部增益的同时也可以获得高量子效率和响应速度。但缺点是对工艺要求极高,P区的掺杂浓度太高,反偏压降全部落在高场区,Π型区还没有耗尽之前,高场区发生倍增,到达Π型区的载流子漂移速度低,降低了器件的响应速度;相反,Π型区耗尽太快,器件到达雪崩倍增所需的外加偏压会过高。
目前国内的技术有限,生产的APD的Vbr过高,一致性较差均是以上原因导致。
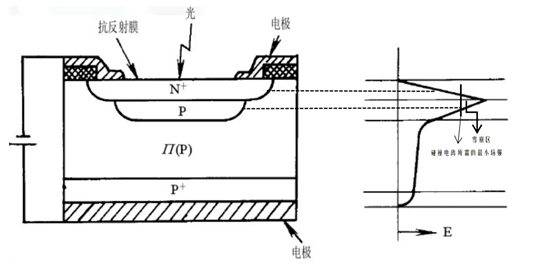
图一:拉通型APD器件
二、APD的性能参数
1.APD的光谱响应范围
APD的光谱响应范围在300nm-1700nm,其中硅APD:30nm-1100nm;锗APD:800nm-1600nm,InGaAs APD:900nm-1700nm。目前,大部分厂商都能生产峰值光谱响应在905nm处的APD。
2.APD的倍增因子
由于雪崩倍增是碰撞电离激发产生电子-空穴对的过程,随机性很大。因此,一般从单次光电流所产生的平均增益的倍数来描述它的放大作用,即
式1:倍增因子的定义
式中分子为倍增后的光电流(即总电流--暗电流),分母为无倍增时的光电流,即由光子直接产生的单次平均电流。暗电流的大小影响光电检测器的噪声大小,暗电流一般很小,这里可以忽略不计。
倍增因子M随外加反偏压V接近击穿电压VB时迅速增大,当V=VB时,M值为+∞,随后出现增益饱和效应。两者的关系可近似用下式表示:
式2:倍增因子与工作电压的关系
上式中,n为常数,由半导体材料,掺杂分布和入射光波长决定。故,可通过控制偏压以获得所需的M值。
但若M过大,会导致APD的信噪比降低,灵敏度也会随之降低,故M值的选取应该使信噪比最大。一般工作电压在0.95Vbr时,为最佳值。
3.APD的响应速度
单位入射光功率作用到探测器后外电路产生的光电流的大小为探测器的响应度。通常在探测器的入射面蒸镀增透膜,可以提高器件的量子效率和响应度。
APD的响应速度主要由载流子完成倍增过程的时间和在耗尽区内的渡越时间有关。一般响应时间在0.5ns-1.5ns之间。
4.暗电流和噪声
通常在无光照的条件下,两端电极加上反向电压时,流过探测器的电流被定义为暗电流。因为半导体内部存在载流子产生-复合电流,耗尽层边界少数载流子的扩散流,表面漏电流和隧道电流。因此,暗电流可以反映出器件内部材料的质量和后端工艺的好坏。暗电流越大,说明材料外延质量较差,导致内部缺陷较多。
在APD的噪声主要来源是载流子雪崩倍增过程所产生的过剩噪声,由于载流子的碰撞电离是一个随机的过程,光生载流子因增益的随机起伏产生了一种超过原先只有散粒噪声被放大的噪声水平。
三、APD温度补偿电路的设计
1.APD的工作模式
光电二极管有两种工作方式:光伏模式和光导模式。
光伏模式中光电二极管零偏,电路中无暗电流,噪声低,光转换性好,但响应时间低;光导模式中光电二极管反偏,光电转换性非线性,但响应快,适用于高速场合。故在激光雷达中APD的工作方式为光导模式,如下图所示。
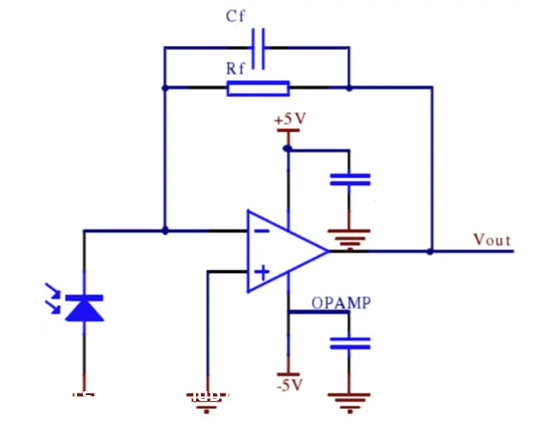
图二:APD工作方式
2.温度补偿设计
由于电离速率取决于温度,随着温度的升高,其雪崩电压不断增加,增益也随之变化。为保持最佳增益,需要一个温度补偿电路来控制APD的偏置电压,使其在各温度下都能以最佳增益工作,从而使接收系统获得最大的信噪比。
1.温度传感:
直接使用模拟温度传感器,放置靠近APD的位置,实时监测APD的的温度,输出至MCU从而控制电压源的输出电压。
2.可控高压:
采用高精度低温漂可控高压的电源模块。电源模块输出的电压需加入滤波电容来滤掉其纹波电流。可采用多个电容并联的方式来减少ESR值,若纹波过大,也可采用共模滤波的方法来减少ESR值。
3.前置放大电路
就电路而言,主要有三种:低阻前置放大,高阻前置放大,跨阻前置放大。
低阻前置放大主要使用BJT射极放大,输入阻抗低,带宽较大,但不能提共较高的接收灵敏度,噪声较大,实际中很少使用;高阻前置放大一般使用输入阻抗大、噪声小的FET,为降低噪声需加大偏置电阻,由于高阻抗形成了一个较大的RC时间常数,相当于对信号进行了积分,因而带宽较小,不适用于高速高精度场合。
而跨阻放大器实际上时电压并联反馈放大器,是一种性能优良的电流-电压转换器。其噪声低,带宽高,且稳定性好,因此在实际应用中较为广泛。
四、APD失效因素
1.器件发热损坏
1.由于负载短路导致的损耗引起发热
2.由于芯片不能正常散热,持续的高温导致的热击穿的损坏
2.浪涌冲击、静电损坏
由于后端TIA开关的浪涌冲击,进入击穿区而引起雪崩损坏
五、APD反向击穿电压的测试
因APD制作工艺的限制,同一批生产出来的APD在击穿电压和温度特性上会有一些差异。在使用多个APD的系统中,需要筛选出一致性较好的APD从而保证接收信号信噪比的一致性。
常规检测APD击穿电压的原理如下图所示:
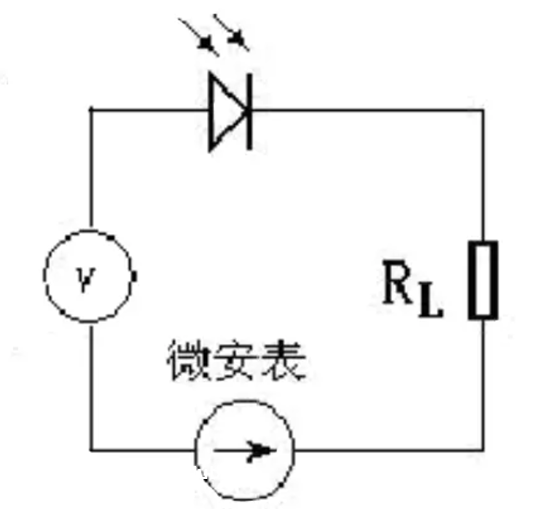
图三:偏压测试原理
RL为限流电阻,V为线性电压源,逐渐增加电源电压,使电路电流I为1uA,10uA时记录当前电压V。注:实验应使APD处于黑暗环境中。
方便快速测试验证,也可选用数字源表,例如吉时利的2450数字源表,可直接测出APD的I-V曲线,如下图所示:
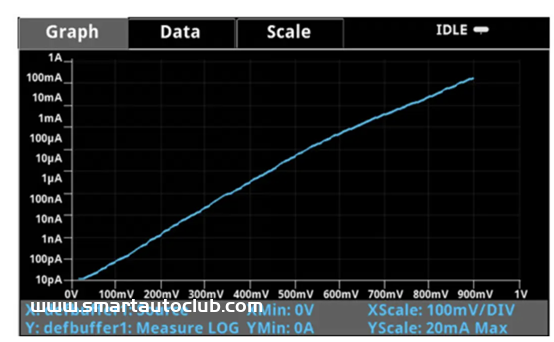
图四:二极管V-I特性曲线
本文来源:
https://www.bilibili.com/read/cv8810669/

欢迎加入艾邦激光雷达产业通讯,目前有2700人,涵盖各大激光雷达厂商以及主机厂相关负责人,点击下方标签可以筛选
激光雷达 主机厂 自动驾驶 应用终端 激光器 VCSEL 光探测器 传感器 光学元件 光学模组 滤光片 振镜 光学部件 雷达罩盖 胶粘剂 电子元件 半导体 芯片 tier1 零部件 非标自动化 五金 线路板 电机 镀膜 镀膜设备 塑胶制品 汽车电子 表面处理 汽车配件 设备 检测设备 连接器 塑料 材料 软件 贸易 代理 高校 研究所 其他
资料下载: