

2021年开始,全球都掀起了激光雷达量产上车的热潮,而激光雷达作为最为先进的车载传感器系统产品,其硬件机械性能的评估、点云质量的评价,以及对目标物与环境感知的结果的测试与验证,都需要面向量产的激光雷达测试验证的完整解决方案。
12月15日,由艾邦智能汽车俱乐部在苏州举办的2021年激光雷达创新技术及产业链高峰论坛上,知名测试验证服务供应商亮道智能的测试验证高级总监张卫涛给大家详述了面向激光雷达级的系统测试方案,现带大家回顾一下。

-
激光雷达的点云质量评测
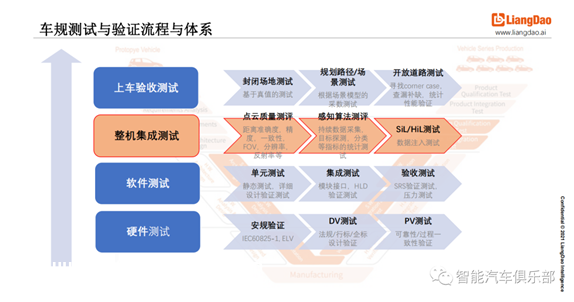
一个传感器或是说一个零件,上车会经过复杂的测试,包括硬件的测试(DV、PV等等),软件测试(单元、集成测试),软硬件结合的整机集成测试等,具体到激光雷达就包括点云质量测评、感知算法测评以及SiL/HiL等。
图片截于演讲PPT,可公开演讲PPT关注"智能汽车俱乐部"公众号对话框输入"20211215"即可下载
点云质量测评一直来讲对于激光雷达是一个比较难的话题,每家激光雷达供应商的激光雷达点云格式、点云的制定都不一样,所以这是检测验证激光雷达的点云质量的难题所在。未来解决这一难题,今年12月9日,亮道智能和上海汽检成立了车载激光雷达测试联合实验室,车载激光雷达测试联合实验室是目前国内首家提供车载激光雷达点云评价的专项测试实验室。实验室可开展激光雷达探测性能、点云质量、功能场景等技术测评,并出具专业的第三方测评报告。

图片截于演讲PPT,可公开演讲PPT关注"智能汽车俱乐部"公众号对话框输入"20211215"即可下载
测试内容包括:
-
受控环境性能测试
恒温恒湿测试暗室
高精度测试系统
激光回波模拟器
-
封闭场地性能测试
700m标准直线跑道
高精度测试小车&全站仪
-
环境干扰测试
雨雾模拟系统
假目标车及交通参与者
各种道路交通标志
二、激光雷达的感知算法评测
激光雷达的感知算法测评有别于传统的传感器测试验证思路,基于功能定义的测试验证,只适用于功能单一的线性传感器。自动驾驶领域的感知系统特征包含:处理海量数据、不确定性高、感知环境复杂、测试覆盖面广,故传统的传感器测试验证方法与思路不适用于对自动驾驶领域的测试。

图片截于演讲PPT,可公开演讲PPT关注"智能汽车俱乐部"公众号对话框输入"20211215"即可下载
亮道智能采用基于数据的测试验证思路来测试自动驾驶领域的传感器,需要数据采集平台和数据管理与处理平台两个平台共同完成。在做测试验证之前,亮道智能会先帮客户分析设计一个数据采集平台,主要包含一些真值的传感器,真值传感器各方面的特性要覆盖待测传感器,如FOV、探测距离、精度等参数。
然后将真值系统和待测系统一同搭载在测试平台上进行数据采集,数据采集有两种思路,一种是采集原始数据后期处理,另一种是边采集边处理,进行在线采集对比测评。
图片截于演讲PPT,可公开演讲PPT关注"智能汽车俱乐部"公众号对话框输入"20211215"即可下载
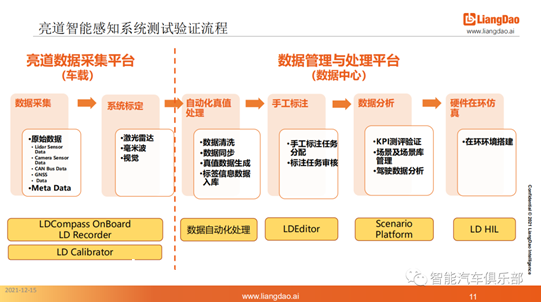
测试验证的大致流程就是数据采集→系统标定→自动化真值处理→手工标定→数据分析→硬件在环仿真,基于这个流程,亮道智能能提供数据采集平台LDCompassTM OnBoard、感知系统标定、数据采集、自动化真值处理、亮道手动标注软件LD Editor、感知性能测试的KPI分析等。

图片截于演讲PPT,可公开演讲PPT关注"智能汽车俱乐部"公众号对话框输入"20211215"即可下载
关于亮道智能
亮道智能是一家技术领先的新型激光雷达系统供应商,专注于激光雷达系统在智能驾驶和未来智慧出行领域的智能化应用开发。公司愿景在未来十年内将激光雷达广泛地应用于自动驾驶汽车和智慧交通领域,点亮未来智慧出行,提高驾驶安全与通行效率。

亮道智能目前已经与长城汽车、Audi、 VW、 Magna、四维图新、FEV、Ibeo、Ouster、NVIDIA等自动驾驶核心技术企业建立了深度合作关系,并将在未来几年进一步推动激光雷达在车载量产的发展中扮演领军角色。

欢迎加入艾邦激光雷达产业通讯,目前有2700人,涵盖各大激光雷达厂商以及主机厂相关负责人,点击下方标签可以筛选
激光雷达 主机厂 自动驾驶 应用终端 激光器 VCSEL 光探测器 传感器 光学元件 光学模组 滤光片 振镜 光学部件 雷达罩盖 胶粘剂 电子元件 半导体 芯片 tier1 零部件 非标自动化 五金 线路板 电机 镀膜 镀膜设备 塑胶制品 汽车电子 表面处理 汽车配件 设备 检测设备 连接器 塑料 材料 软件 贸易 代理 高校 研究所 其他
资料下载: